1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
|
import torch.nn as nn
from torch.nn import functional as F
class ResNetModel(nn.Module):
"""
实现通用的ResNet模块,可根据需要定义
"""
def __init__(self, num_classes=1000, layer_num=[],bottleneck = False):
super(ResNetModel, self).__init__()
#conv1
self.pre = nn.Sequential(
#in 224*224*3
nn.Conv2d(3,64,7,2,3,bias=False), #输入通道3,输出通道64,卷积核7*7*64,步长2,根据以上计算出padding=3
#out 112*112*64
nn.BatchNorm2d(64), #输入通道C = 64
nn.ReLU(inplace=True), #inplace=True, 进行覆盖操作
# out 112*112*64
nn.MaxPool2d(3,2,1), #池化核3*3,步长2,计算得出padding=1;
# out 56*56*64
)
if bottleneck: #resnet50以上使用BottleNeckBlock
self.residualBlocks1 = self.add_layers(64, 256, layer_num[0], 64, bottleneck=bottleneck)
self.residualBlocks2 = self.add_layers(128, 512, layer_num[1], 256, 2,bottleneck)
self.residualBlocks3 = self.add_layers(256, 1024, layer_num[2], 512, 2,bottleneck)
self.residualBlocks4 = self.add_layers(512, 2048, layer_num[3], 1024, 2,bottleneck)
self.fc = nn.Linear(2048, num_classes)
else: #resnet34使用普通ResidualBlock
self.residualBlocks1 = self.add_layers(64,64,layer_num[0])
self.residualBlocks2 = self.add_layers(64,128,layer_num[1])
self.residualBlocks3 = self.add_layers(128,256,layer_num[2])
self.residualBlocks4 = self.add_layers(256,512,layer_num[3])
self.fc = nn.Linear(512, num_classes)
def add_layers(self, inchannel, outchannel, nums, pre_channel=64, stride=1, bottleneck=False):
layers = []
if bottleneck is False:
#添加大模块首层, 首层需要判断inchannel == outchannel ?
#跨维度需要stride=2,shortcut也需要1*1卷积扩维
layers.append(ResidualBlock(inchannel,outchannel))
#添加剩余nums-1层
for i in range(1,nums):
layers.append(ResidualBlock(outchannel,outchannel))
return nn.Sequential(*layers)
else: #resnet50使用bottleneck
#传递每个block的shortcut,shortcut可以根据是否传递pre_channel进行推断
#添加首层,首层需要传递上一批blocks的channel
layers.append(BottleNeckBlock(inchannel,outchannel,pre_channel,stride))
for i in range(1,nums): #添加n-1个剩余blocks,正常通道转换,不传递pre_channel
layers.append(BottleNeckBlock(inchannel,outchannel))
return nn.Sequential(*layers)
def forward(self, x):
x = self.pre(x)
x = self.residualBlocks1(x)
x = self.residualBlocks2(x)
x = self.residualBlocks3(x)
x = self.residualBlocks4(x)
x = F.avg_pool2d(x, 7)
x = x.view(x.size(0), -1)
return self.fc(x)
class ResidualBlock(nn.Module):
'''
定义普通残差模块
resnet34为普通残差块,resnet50为瓶颈结构
'''
def __init__(self, inchannel, outchannel, stride=1, padding=1, shortcut=None):
super(ResidualBlock, self).__init__()
#resblock的首层,首层如果跨维度,卷积stride=2,shortcut需要1*1卷积扩维
if inchannel != outchannel:
stride= 2
shortcut=nn.Sequential(
nn.Conv2d(inchannel,outchannel,1,stride,bias=False),
nn.BatchNorm2d(outchannel)
)
# 定义残差块的左部分
self.left = nn.Sequential(
nn.Conv2d(inchannel, outchannel, 3, stride, padding, bias=False),
nn.BatchNorm2d(outchannel),
nn.ReLU(inplace=True),
nn.Conv2d(outchannel, outchannel, 3, 1, padding, bias=False),
nn.BatchNorm2d(outchannel),
)
#定义右部分
self.right = shortcut
def forward(self, x):
out = self.left(x)
residual = x if self.right is None else self.right(x)
out = out + residual
return F.relu(out)
class BottleNeckBlock(nn.Module):
'''
定义resnet50的瓶颈结构
'''
def __init__(self,inchannel,outchannel, pre_channel=None, stride=1,shortcut=None):
super(BottleNeckBlock, self).__init__()
#首个bottleneck需要承接上一批blocks的输出channel
if pre_channel is None: #为空则表示不是首个bottleneck,
pre_channel = outchannel #正常通道转换
else: # 传递了pre_channel,表示为首个block,需要shortcut
shortcut = nn.Sequential(
nn.Conv2d(pre_channel,outchannel,1,stride,0,bias=False),
nn.BatchNorm2d(outchannel)
)
self.left = nn.Sequential(
#1*1,inchannel
nn.Conv2d(pre_channel, inchannel, 1, stride, 0, bias=False),
nn.BatchNorm2d(inchannel),
nn.ReLU(inplace=True),
#3*3,inchannel
nn.Conv2d(inchannel,inchannel,3,1,1,bias=False),
nn.BatchNorm2d(inchannel),
nn.ReLU(inplace=True),
#1*1,outchannel
nn.Conv2d(inchannel,outchannel,1,1,0,bias=False),
nn.BatchNorm2d(outchannel),
nn.ReLU(inplace=True),
)
self.right = shortcut
def forward(self,x):
out = self.left(x)
residual = x if self.right is None else self.right(x)
return F.relu(out+residual)
if __name__ == '__main__':
# channel_nums = [64,128,256,512,1024,2048]
num_classes = 6
#layers = 18, 34, 50, 101, 152
layer_nums = [[2,2,2,2],[3,4,6,3],[3,4,6,3],[3,4,23,3],[3,8,36,3]]
#选择resnet版本,
# resnet18 ——0;resnet34——1,resnet-50——2,resnet-101——3,resnet-152——4
i = 3;
bottleneck = i >= 2 #i<2, false,使用普通的ResidualBlock; i>=2,true,使用BottleNeckBlock
model = ResNetModel(num_classes,layer_nums[i],bottleneck)
print(model)
|
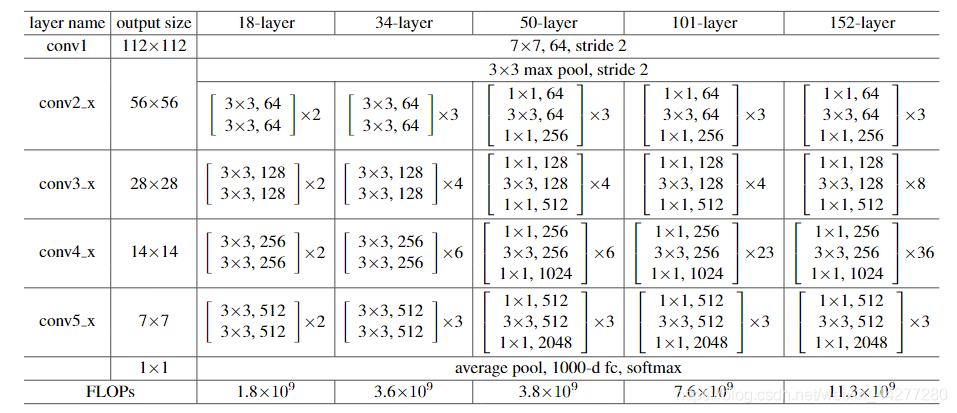 ◎ ResNet网络结构图
◎ ResNet网络结构图 ◎ ResNet结构改写
◎ ResNet结构改写