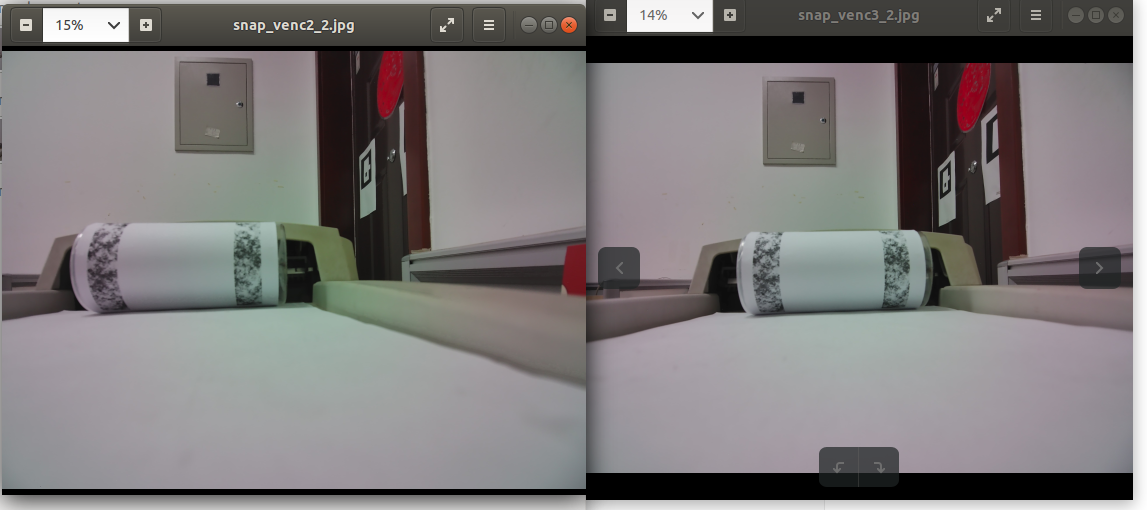
效果图
基于模板匹配的方法,用双目相机测量圆柱体的两端距离,示意图:
重建模板点云:
依赖环境:
|
|
流程
-
读取双目相机标定参数,完成图像去畸变
-
模板图片与图片中的模板用sift提取特征,匹配,得到图像中模板所在的区域
-
对左右图进行特征提取和匹配,只保留在模板区域内的特征。
-
对这些匹配的特征点三角化,在pcl中拟合出圆柱参数,完成半径拟合。
-
对3中的匹配特征对,在模板中找到它的位置,记录它的(x,y)坐标,筛选一些在左右模板尽可能在y坐标上接近的点云对,计算它的距离,利用圆柱的几何信息,计算它沿着圆柱高的分量的长度。
-
该分量加上模板中的(x,y)信息,即为左右模板两端的实际距离,完成测距。